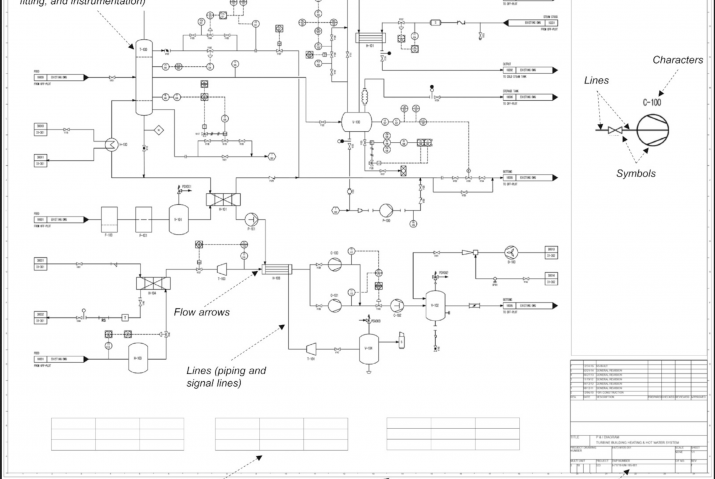
PID (Proportional-Integral-Derivative) control influences a control valve by continuously adjusting its position to regulate the flow of a fluid (e.g., gas or liquid) through a process pipeline or system. The control valve’s position determines the rate at which the fluid flows, and the PID controller manipulates this position to maintain a desired setpoint and control the process variable.
Here’s how PID control influences a control valve:
1. Proportional Action (P):
- The proportional term of the PID controller generates an output signal that is directly proportional to the error between the desired setpoint (SP) and the actual process variable (PV). This output signal is used to adjust the control valve’s position (CO).
- When the error is large, indicating a significant deviation from the setpoint, the proportional term sends a signal to the control valve to move towards a more open or closed position, depending on the specific control strategy.
- The proportional gain (Kp) determines the strength of this influence. A Higher Kp value results in a more aggressive response from the control valve, making it react faster to changes in the error.
2. Integral Action (I):
- The integral term accumulates the error over time and generates an output signal based on the cumulative error. Its purpose is to eliminate any steady-state error that may exist in the system.
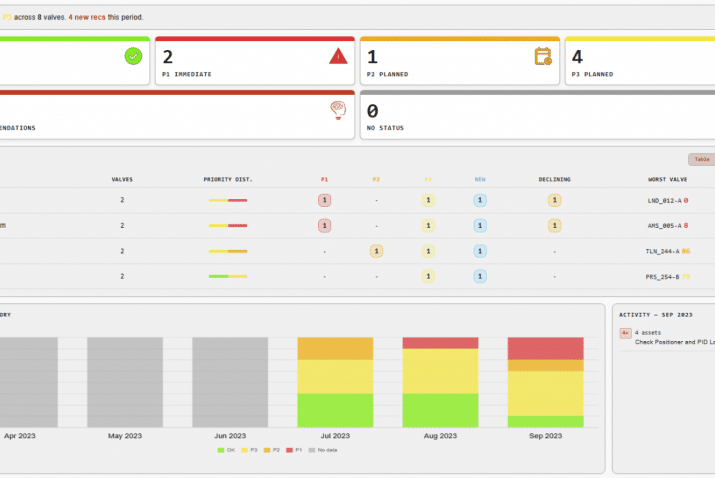
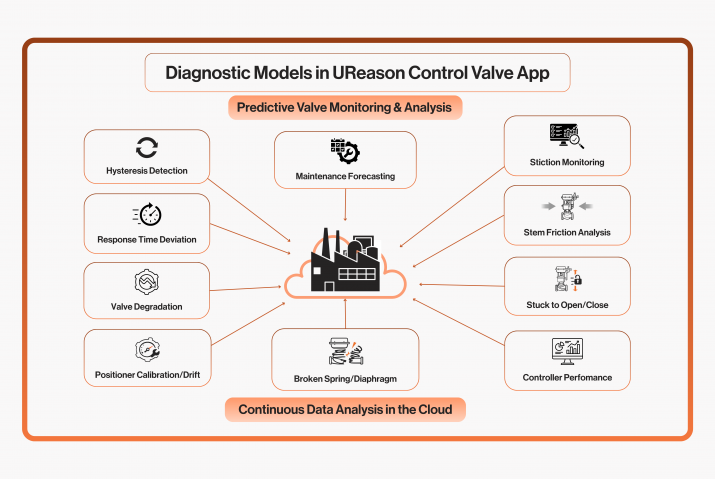
- If there is a persistent difference between the setpoint and the process variable, the integral term sends a signal to adjust the control valve’s position until this error is minimized. Mind you if your positioner is not calibrated well this can provide a continuous actuation (something the Control Valve App informs you about).
- The integral gain (Ki) controls how quickly the integral action responds to accumulated error. Higher Ki values lead to faster correction of steady-state errors.
3. Derivative Action (D):
- The derivative term anticipates the future behaviour of the error by monitoring its rate of change. It generates an output signal based on the rate of error change.
- Derivative action helps dampen oscillations and reduce overshooting by applying corrective action before the error reaches its maximum.
- The derivative gain (Kd) determines the strength of this influence. Too much derivative action can make the system sensitive to noise and may introduce instability.
The combined effect of the proportional, integral, and derivative actions determines the control valve’s position and, consequently, the flow of the fluid. The PID controller continuously computes the control output based on these three terms to bring the process variable as close as possible to the setpoint while maintaining stability and minimizing transient responses.